Surgical Robotic Grippers (2024)
During my sophomore summer, I worked as an undergraduate research assistant in Vanderbilt’s Institute for Surgery and Engineering (VISE). Under the instruction of MED Lab’s Dr. Robert Webster, I helped prototype stiffness-switching soft robotic hydraulic grippers for medical and surgical applications.

This was my first time working in both a lab environment and a medical research setting, so I obviously felt a bit nervous going in. Thankfully, the grad student I worked under and the rest of the MED Lab team were incredibly welcoming and helped me quickly understand the project goals and expectations.
research abstract
Soft grippers are amazing when you need to pick up objects with irregular geometries since they can deform and adapt to them. They fail, however, at picking up heavy items since they're too soft to hold any weight. Solid grippers don't have that issue, but they fail when you need flexibility around the items you're picking up.
This project hopes to create a new kind of soft gripper whose rigidity can be controlled on the fly; this way you get the strength of the solid gripper and the flexibility of the soft one without any major compromises.
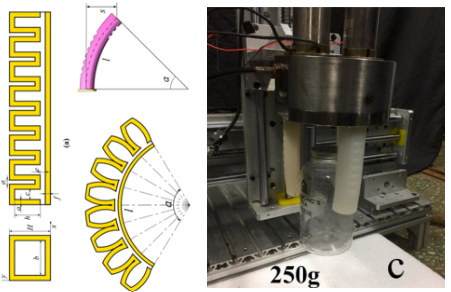
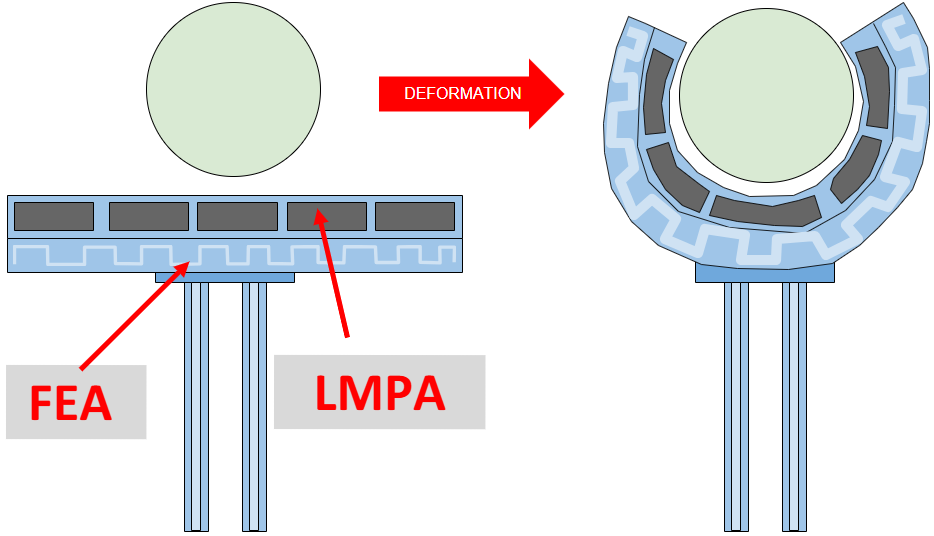
The idea came from combining Fluid Elastomer Actuators (FEAs) with embedded Low-Melting-Point Alloys (LMPAs), two areas already studied within the literature.
how it works
The goal was to create an FEA with embedded LMPAs on its grabbing end. By controlling both the oil pressure inside the gripper and the oil temperature, the system could melt the metal, deform the gripper, and then solidify the metal again to lock its shape around the object being grabbed.
This would give the gripper the ability to conform to a target shape while still maintaining enough rigidity for predictable and reliable grabbing behavior.
hardware
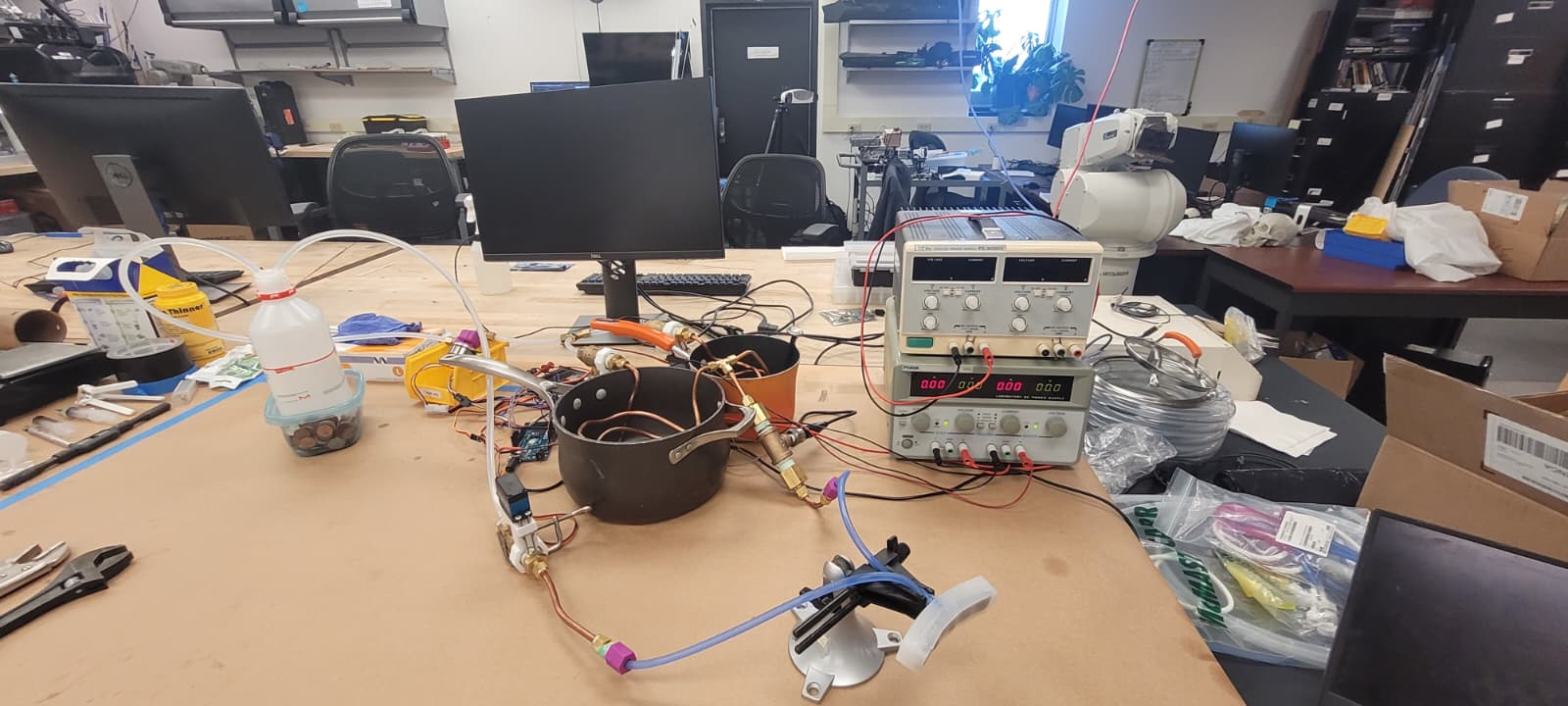
We needed a setup that could quickly test different versions of the silicone grippers. The system had to control the pressure inside the gripper, the temperature of the oil, and the speed at which oil moved through the system.
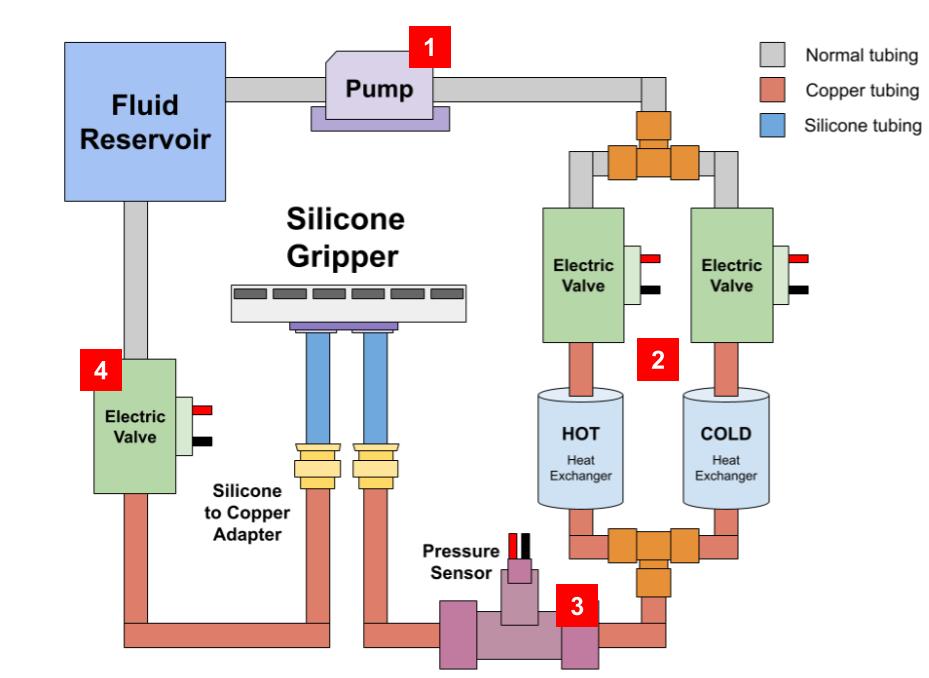
[1] The setup begins with a high-speed motor equipped with a 3D-printed fluid pump adapter designed by Charlie Gallentine from the C* Lab next door. We used an ESCON 50/5 motor controller to achieve precise RPMs.
[2] The oil flow then splits between two copper coils: one dipped inside an ice bath for cooling and one inside a heated bath. The amount of oil passing through each coil is determined by electronic valves before their respective baths. These valves were custom-made by adding a 3D-printed adapter and a high-torque servo motor to regular piping valves.
[3] To measure the pressure within the gripper, we placed a pressure sensor as close to the end-effector quick connect as possible. The analog readings were passed through an ADC to get more accurate measurements.
[4] Finally, the pressure valve helped pressurize the system when closed. On the programming side, we added a failsafe that automatically opened the pressure valve if the sensor readings spiked outside the expected operating range.
software
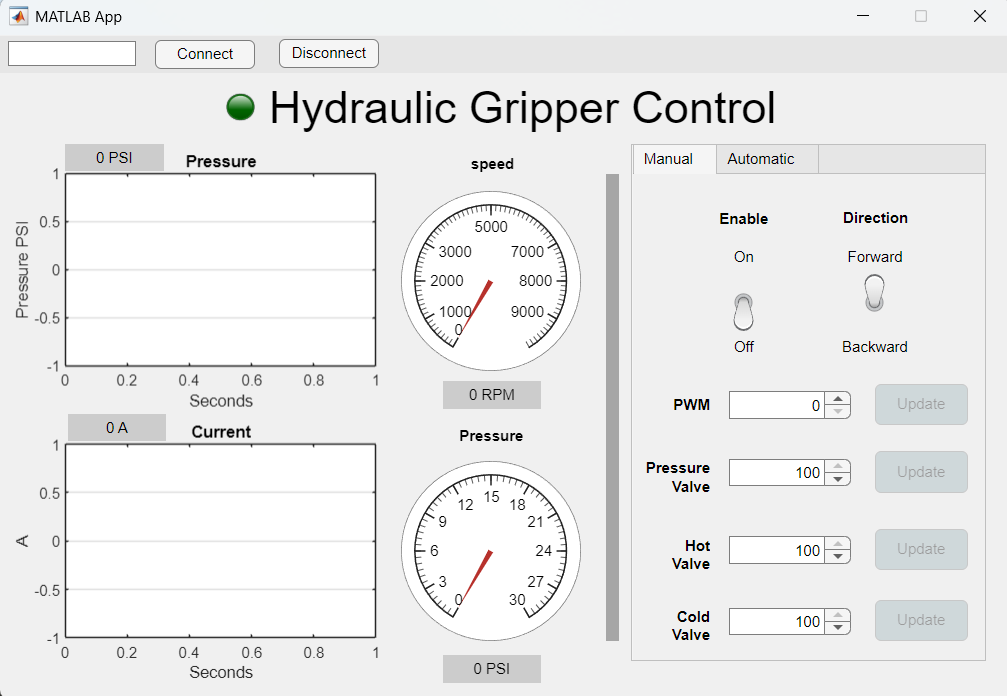
Using MATLAB Simulink, I designed a graphical user interface to interact with the gripper. It included real-time gauges and plotters, manual controls, and automatic commands for repeated tests.
Once we began data collection, the GUI helped cut our work significantly by giving us a reliable way to run experiments and automatically sort data from repeated tests.
results
By the end of the summer, we successfully created a working prototype of the stiffness-switching surgical gripper. We ran tests to measure performance, including grip strength, response time, and durability. The results were promising, showing improvements in adaptability and precision compared with traditional grippers.

I also had the chance to present our findings to VISE faculty during the end-of-summer presentation, which gave me the opportunity to showcase the work and receive feedback from experienced researchers.
final notes
This project was an incredible learning experience that enhanced my technical skills and deepened my understanding in this field. Although medical robotics is not my primary field of interest, I really enjoyed working in a lab environment and collaborating with a team of passionate researchers.
I am grateful for the opportunity to contribute to such an innovative project and for the chance to apply hardware, software, and controls work to a real research prototype.
credits
institution: Vanderbilt Institute for Surgery and Engineering
lab: MED Lab, under Dr. Robert Webster
my role: undergraduate research assistant, hardware test setup, control interface, experimentation support